
In the first publication of this Value-Based Robotics series, we analyzed several factors that constitute barriers to establishing Value-Based Robotics as a reality. One of them was that there is insufficient evidence on clinical benefits to justify an investment in robotics.
Interventional Systems tackles this challenge by offering a miniature robot with all the key features that make it the perfect smart assistant for image-guided procedures, Micromate™, while at the same time decreasing the need for high initial and running costs.
These are key points in our goal to make medical robotics the standard of care instead of the exception. Something that seems impossible, until it is not.
Better clinical outcomes
The minimally invasive surgery era has unlocked new possibilities for the improvement of medical procedures, where higher accuracies and faster recovery times allow for less time spent in inpatient care.
High accuracy is crucial in image-guided interventions. Inaccuracies, low diagnostic yield, and incorrect initial treatments make for repeated interventions and increasing costs, posing logistic and personal burdens for the clinic and the patient while subjecting all parties involved to further unnecessary radiation.
When compared to the state-of-the-art:
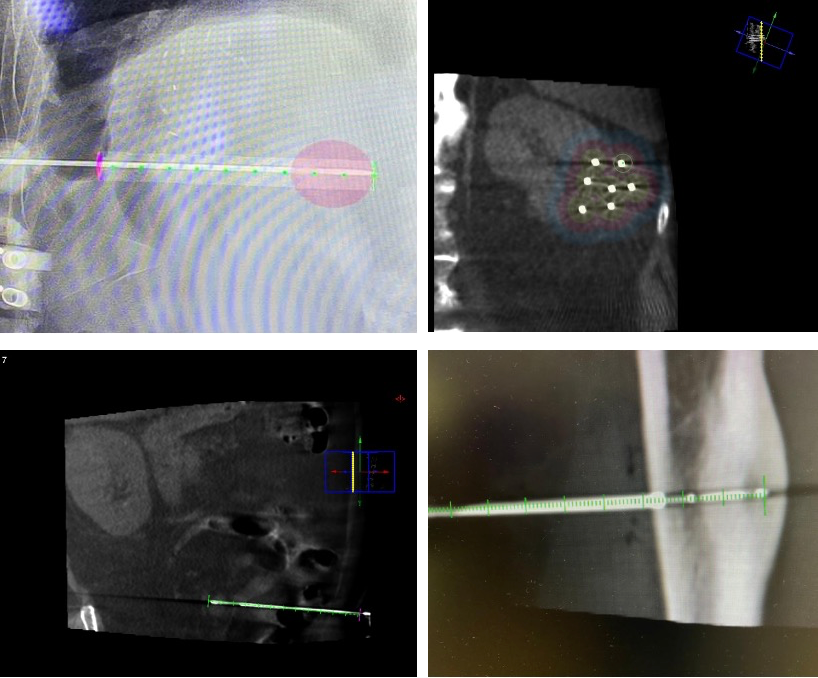
- More accurate: published studies demonstrate that Micromate™ is 50% more accurate than state-of-the-art techniques1,2,3 (patient-mounted or freehand needle guidance solutions) for percutaneous image-guided procedures, often achieving average accuracies within 1mm along the trajectory and the planned target position. This gives physicians increased confidence that their surgical plan will be successfully executed, especially for procedures that require the placement of multiple (and often perfectly parallel) needles.
- Lower complication rates: an average of around 4% of complication rates on stereotactic surgeries using Micromate™ have been described4,5,6, corresponding to a reduction of complication rates of up to 43%, compared with the state-of-the-art7.
- As minimal as minimally invasive can be: Micromate™ provides a universal needle-guide set for percutaneous procedures and, fueled by its high accuracy, smaller incisions for stereotactic procedures can be achieved4.
- Lower radiation exposure: a physician’s exposure to radiation can be reduced by virtually up to 100%, as Micromate™ can be remotely controlled from outside the intervention room under live imaging. As for the patient, a radiation decrease of up to 84% has been documented, mostly due to the faster alignment speed, when compared to free-hand alignment techniques2,8.
A truly enabling technology
Clinical evidence shows Micromate’s irrefutable advantages in terms of accuracy, invasiveness, and radiation exposure.
But patient-centric care also requires physicians to resort to three other dimensions of their skillset: technical skills (to align instruments to the surgical plan and maintain that alignment), and intellectual and clinical skills (to treat the patient and make intra-operative decisions that may impact the therapy).
We have designed Micromate™ to take over the technical skills, by performing highly accurate movements and maintaining a working channel for instrument insertion and guidance.
Due to its small form, Micromate™ fits inside the gantry or between a patient and the C-arm detector, which allows the alignment to be executed under live imaging. Potential deviations are corrected live and immediately.
This frees physicians to focus on doing what they do best: treat the patient. This means not only defining the surgical plan, evaluating its condition, and looking out for complications, but especially manually delivering the instrument.
Despite autonomous instrument insertion being a very recent trend for percutaneous procedures, physicians still rely on haptic feedback while delivering instruments. It is even possible to differentiate between different tissues during instrument insertion, based on the tissue’s resistance – for example, this is used to detect when a biopsy needle enters a tumor.
Micromate™’s disposable needle guides have been designed to hold instruments with a user-adjustable gripping force, allowing to find an optimal compromise between play-free guidance while keeping the much-needed haptic feeling.
Finally, the instrument can be inserted under live imaging as well, which brings additional, real-time information to help physicians deliver the instruments to the desired target location.
Micromate™ is not meant to replace the physician, it’s meant to enable their skills while providing assistance (as a stable third hand) on the most difficult step of the workflow, without requiring significant adaptations.




